Hi, sorry the delay but I was taking care of my son these days.
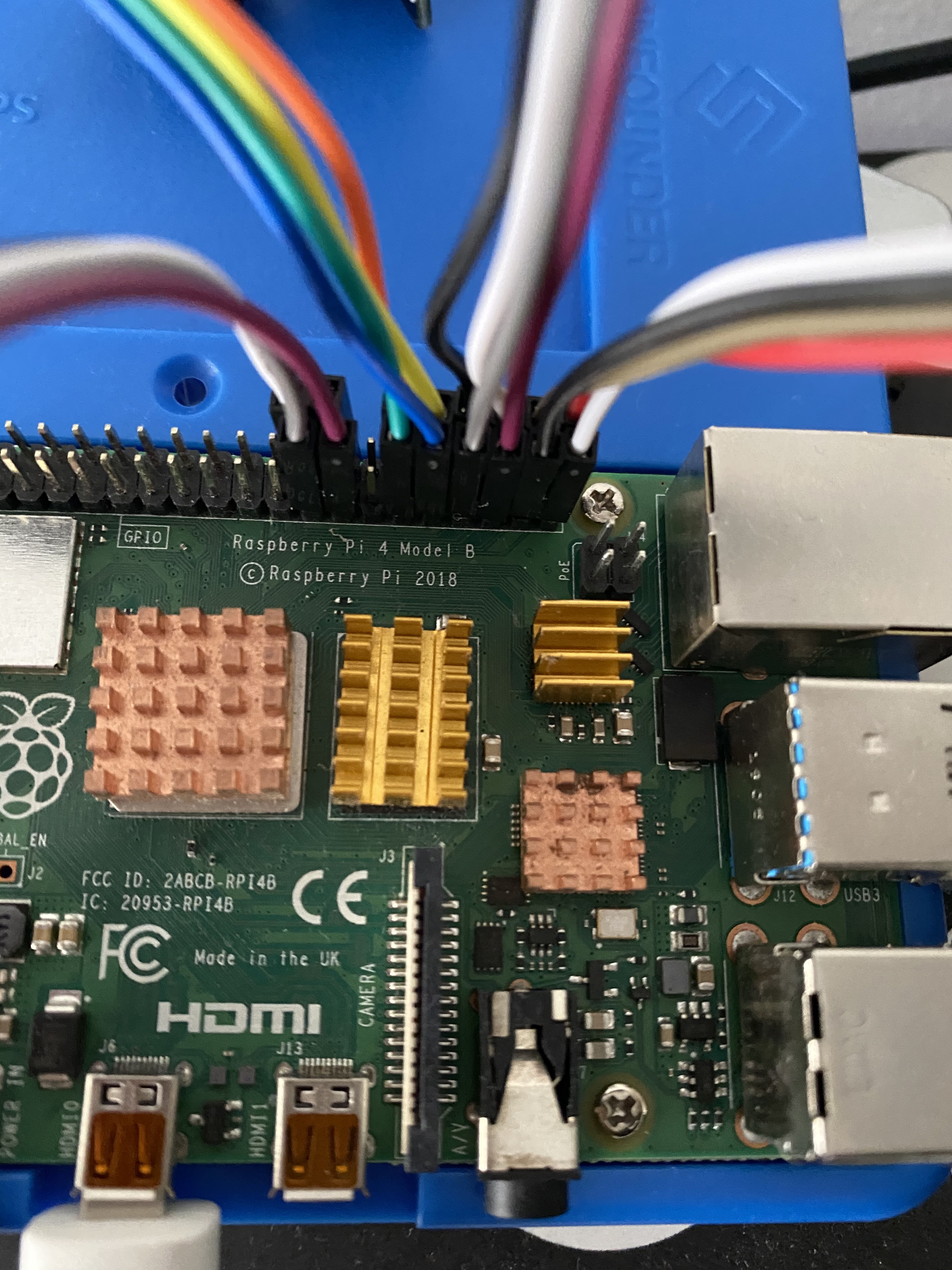
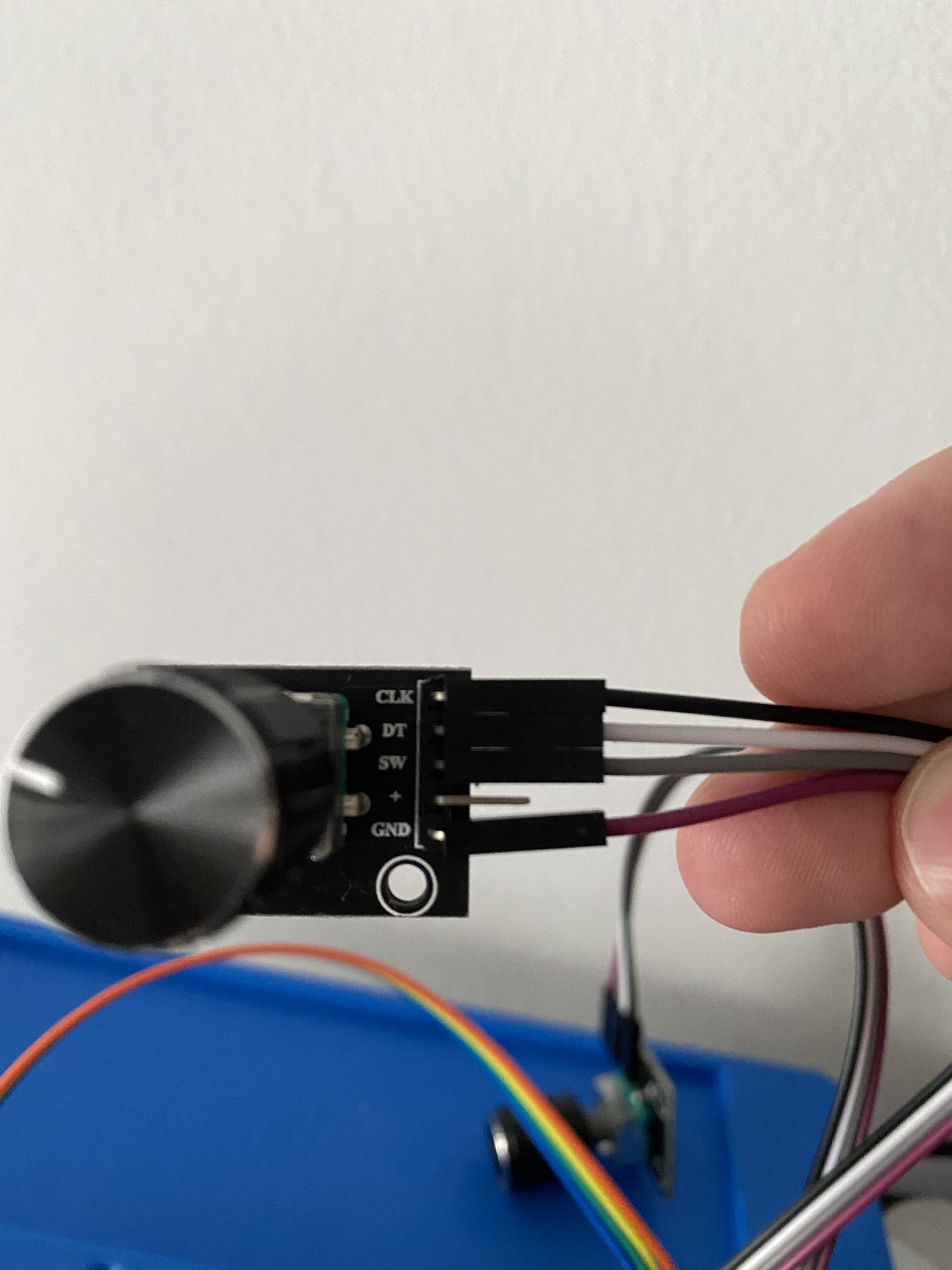
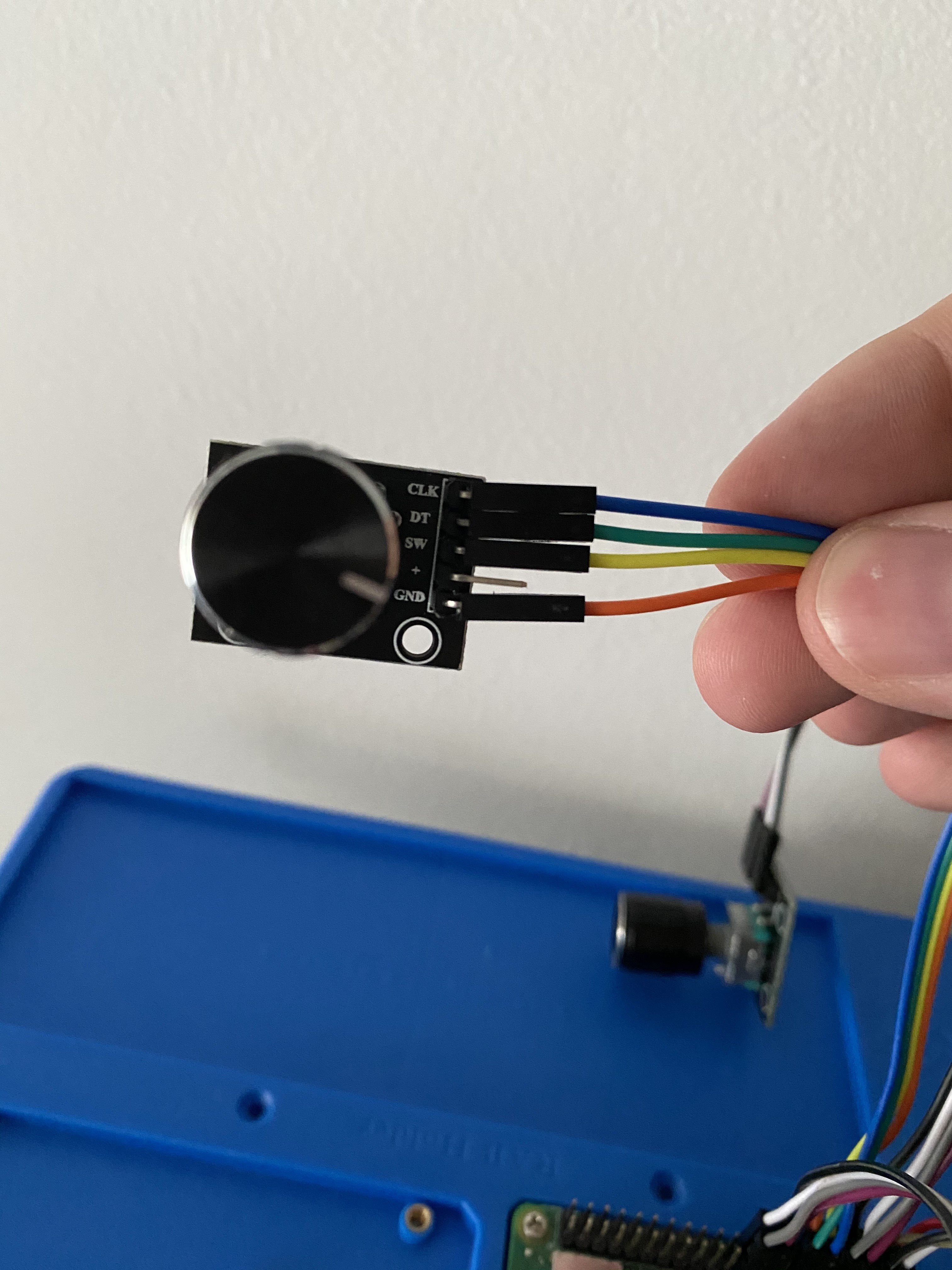
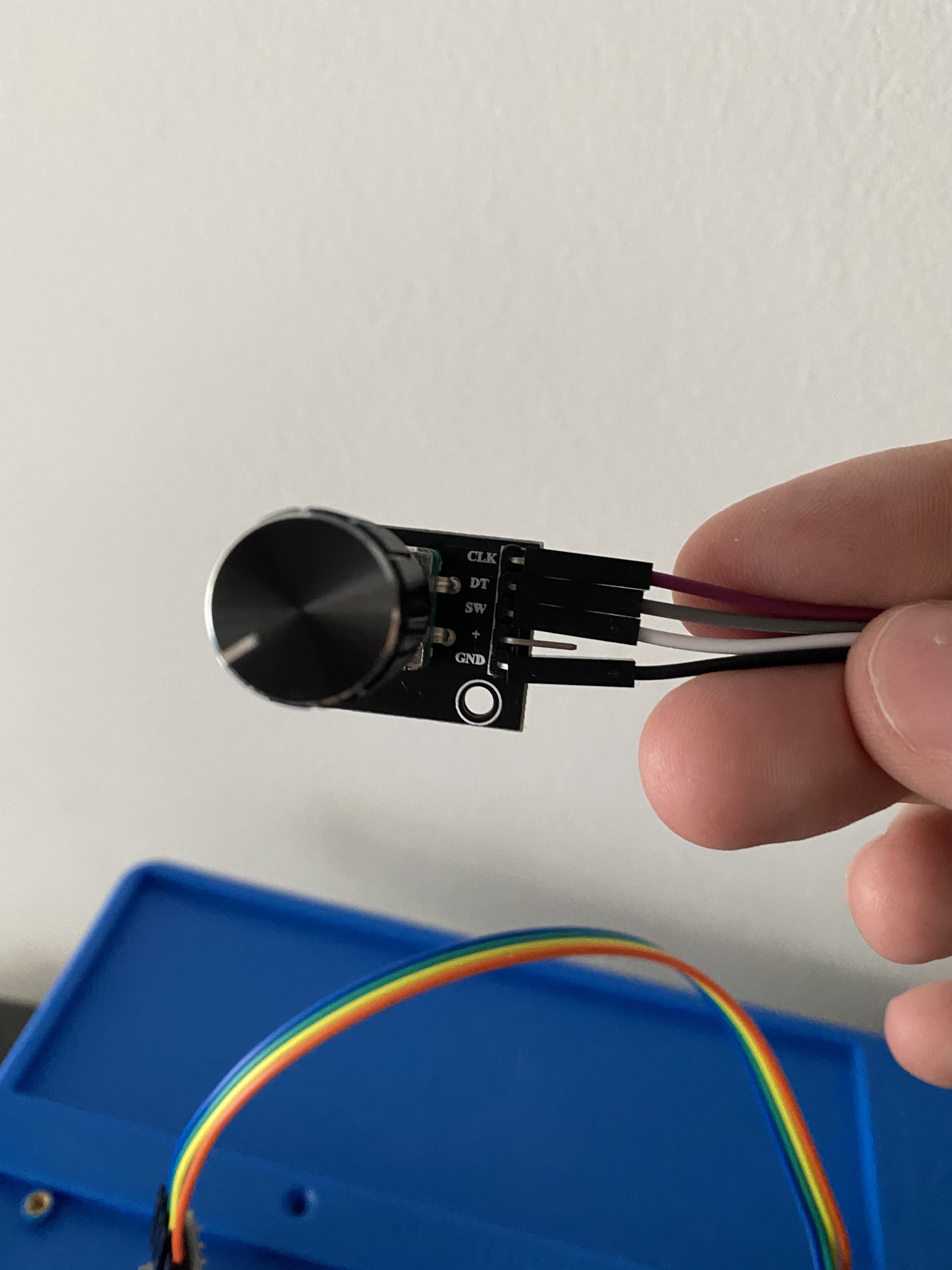
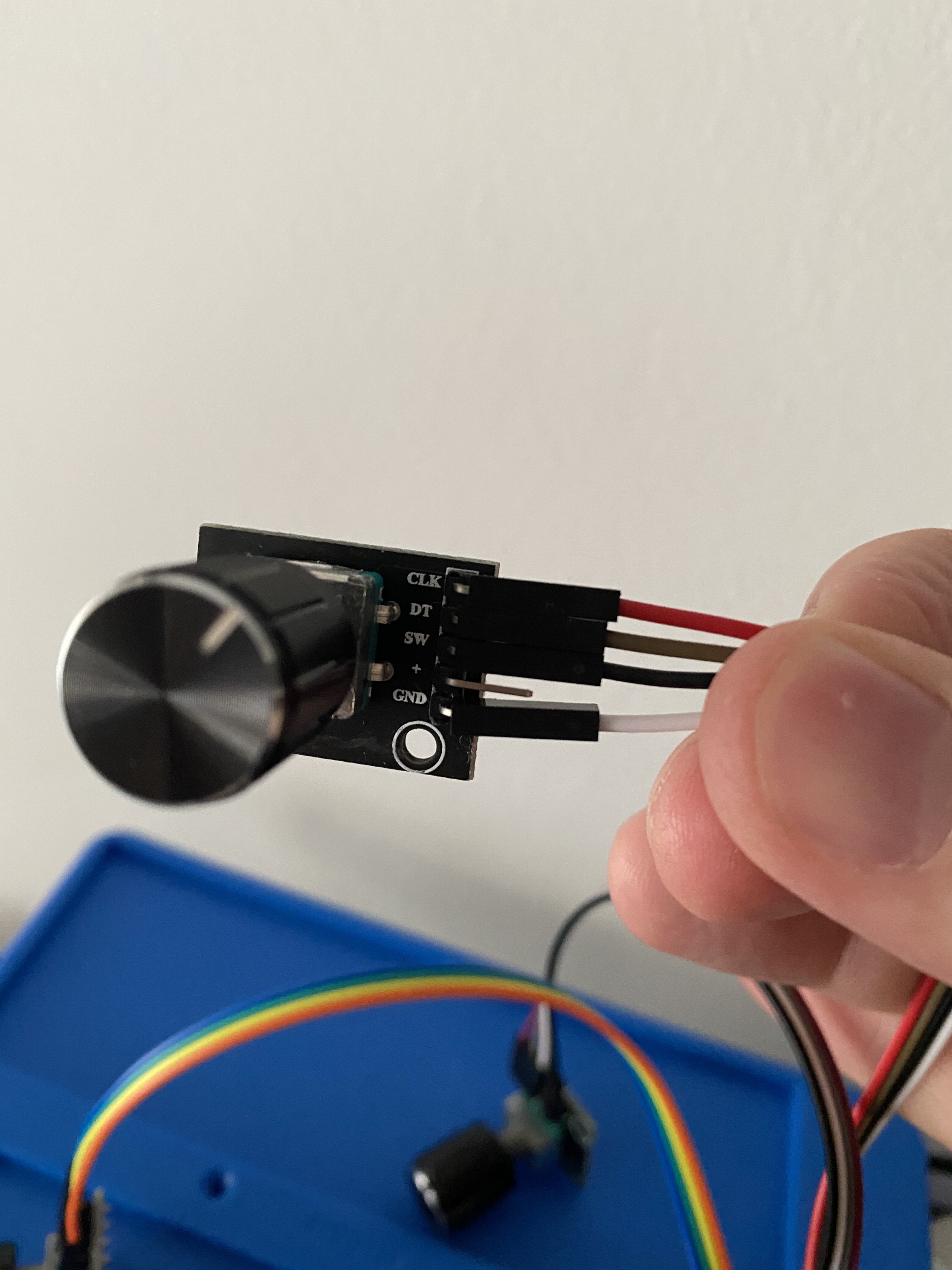
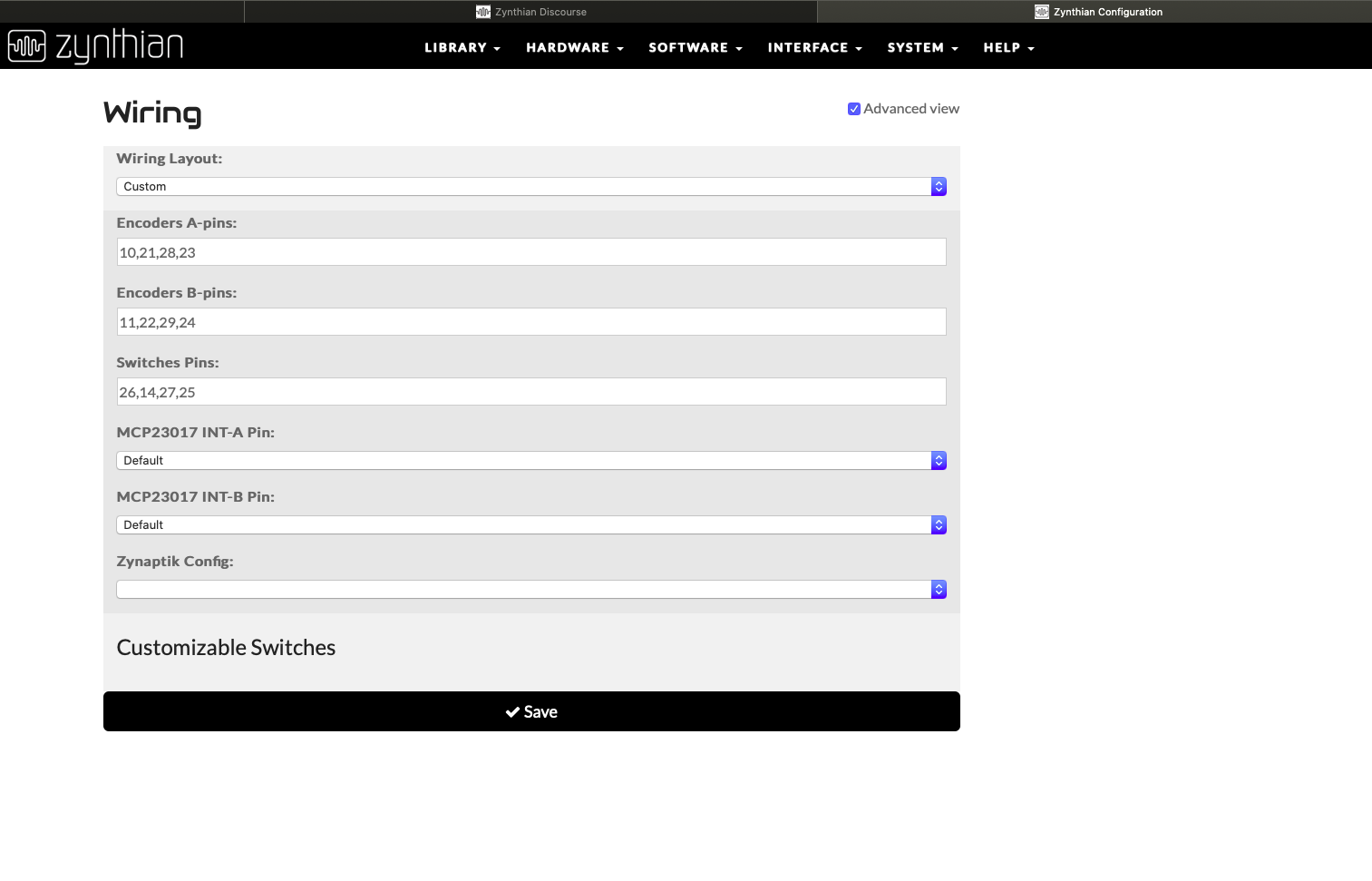
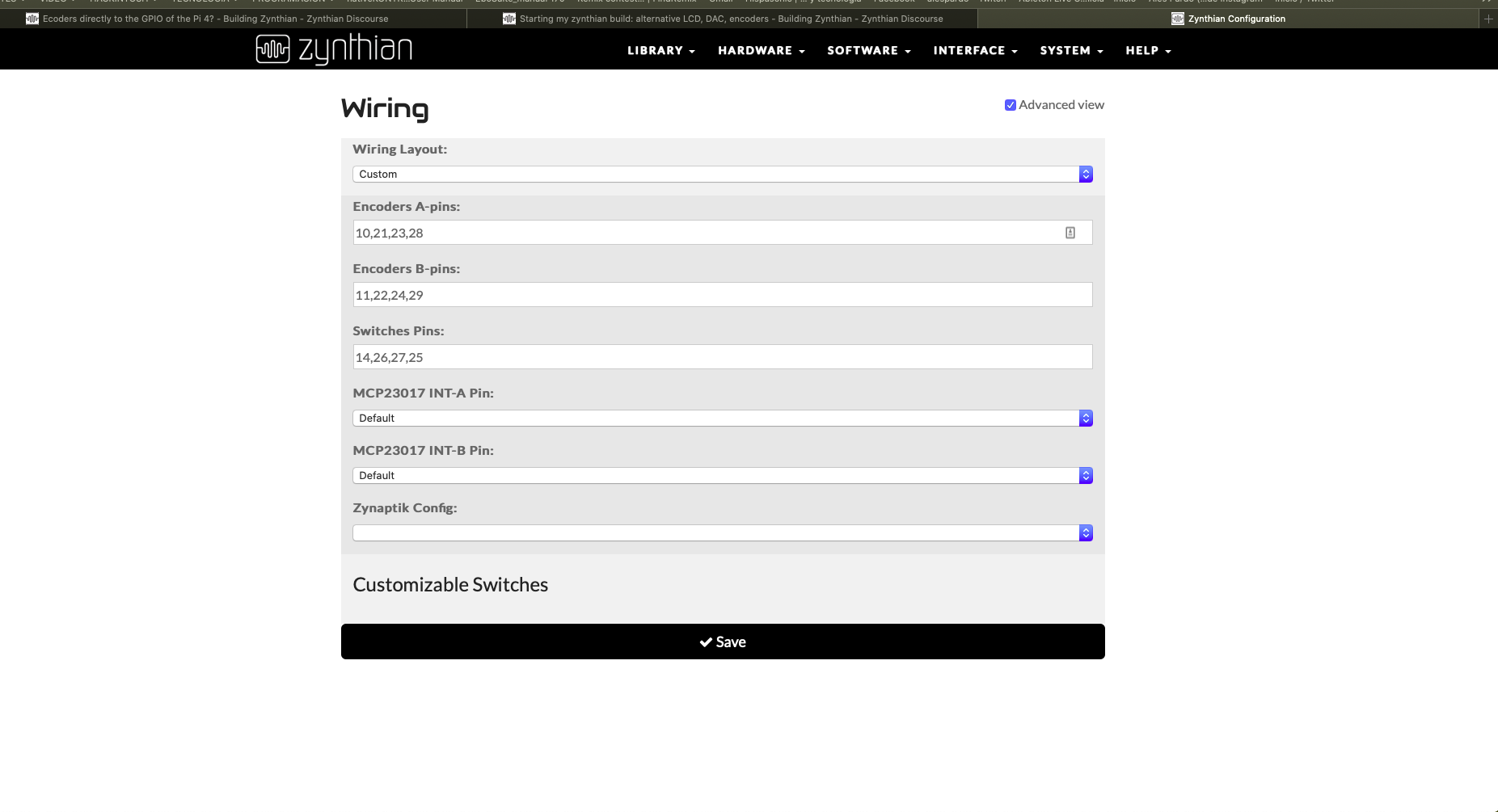
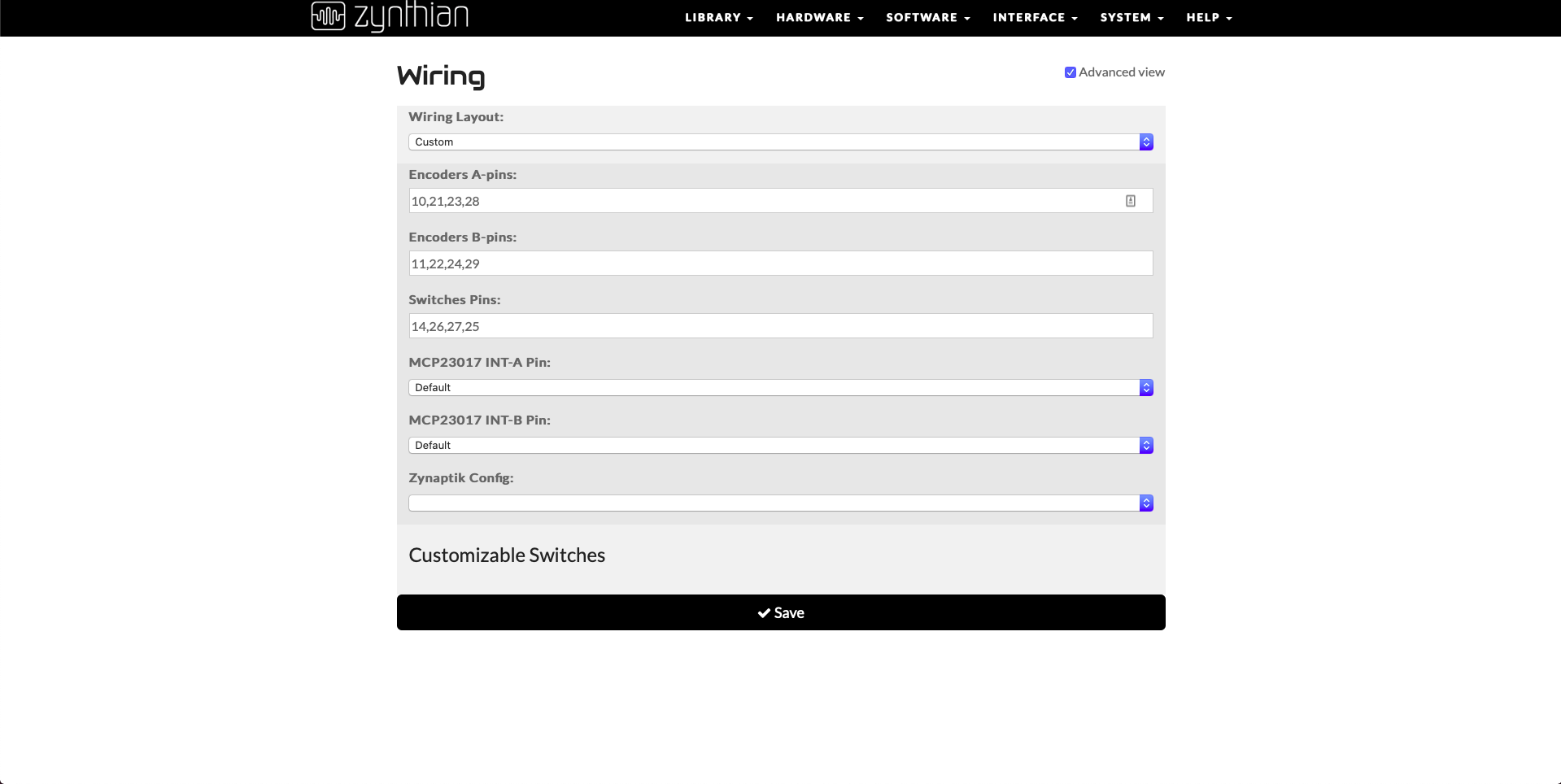
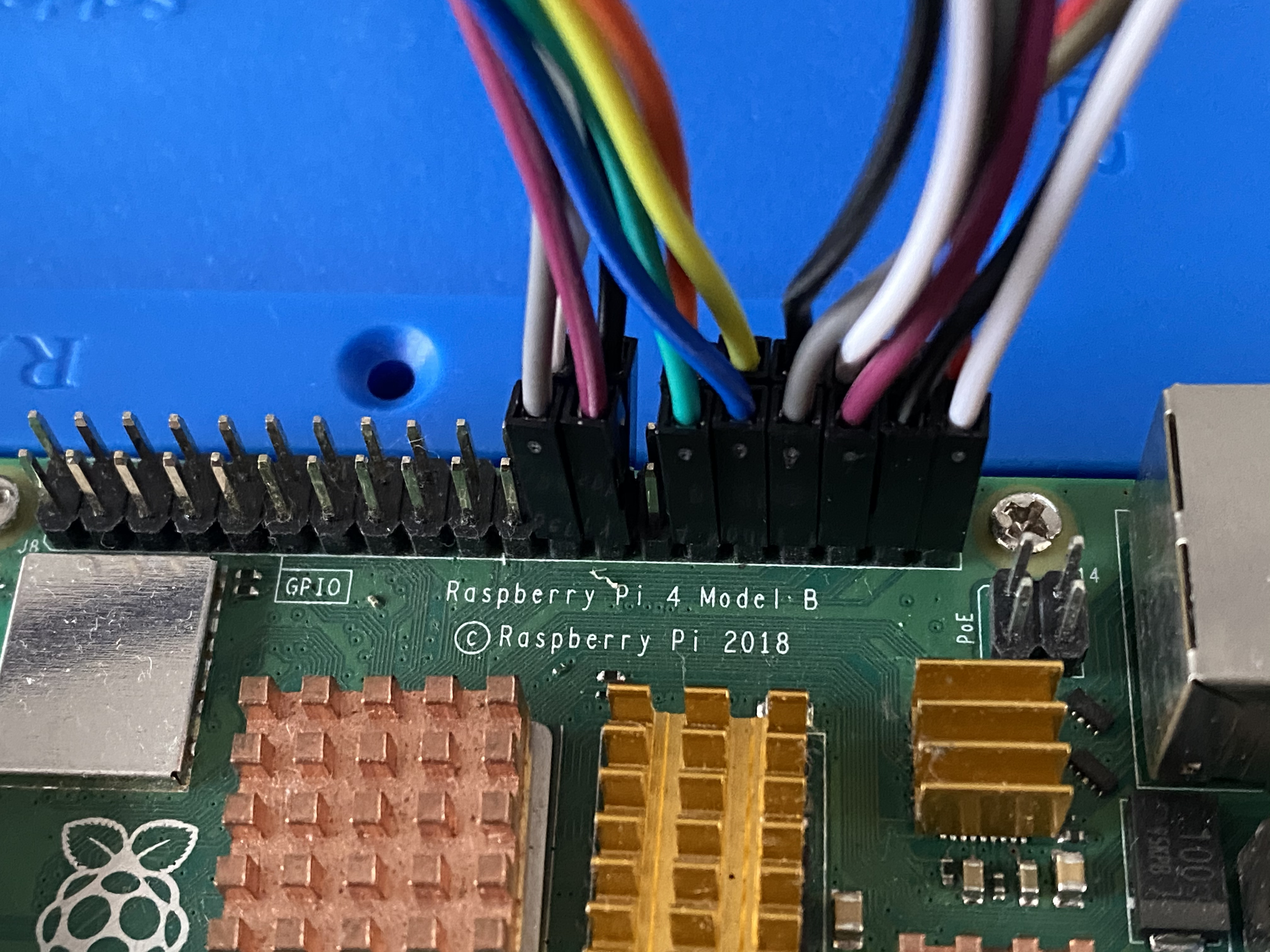
I wire the 4 encoders on the GPIO like on your schematic. The thing is with the web config, I tried cloning your photo configs but doesn’t works.
Tryed too putting the BCM numbers but doesn’t works too.
With your photo configs only works fine the switches. No one encoder can turn ok any parameter of any Zynthian layer.
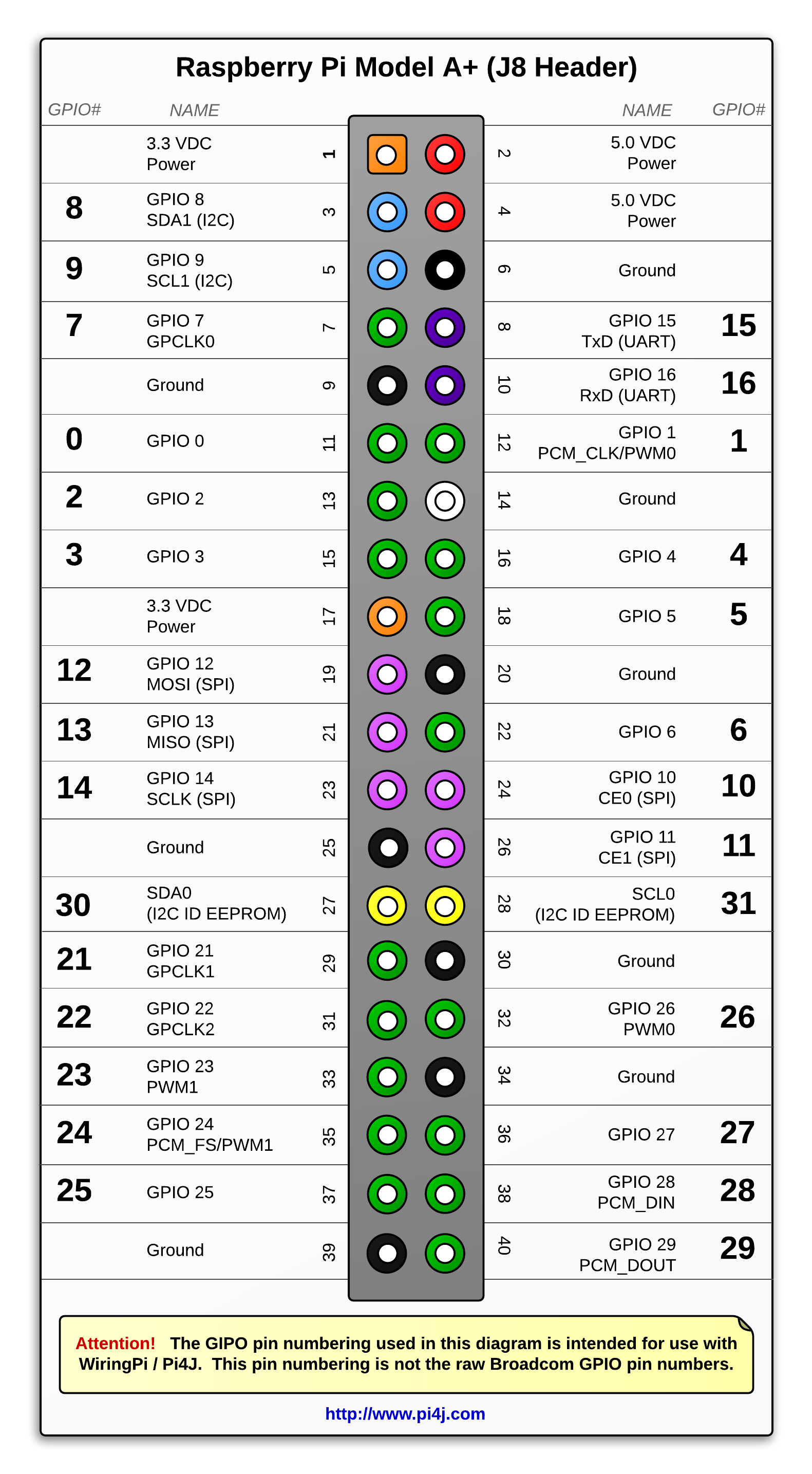
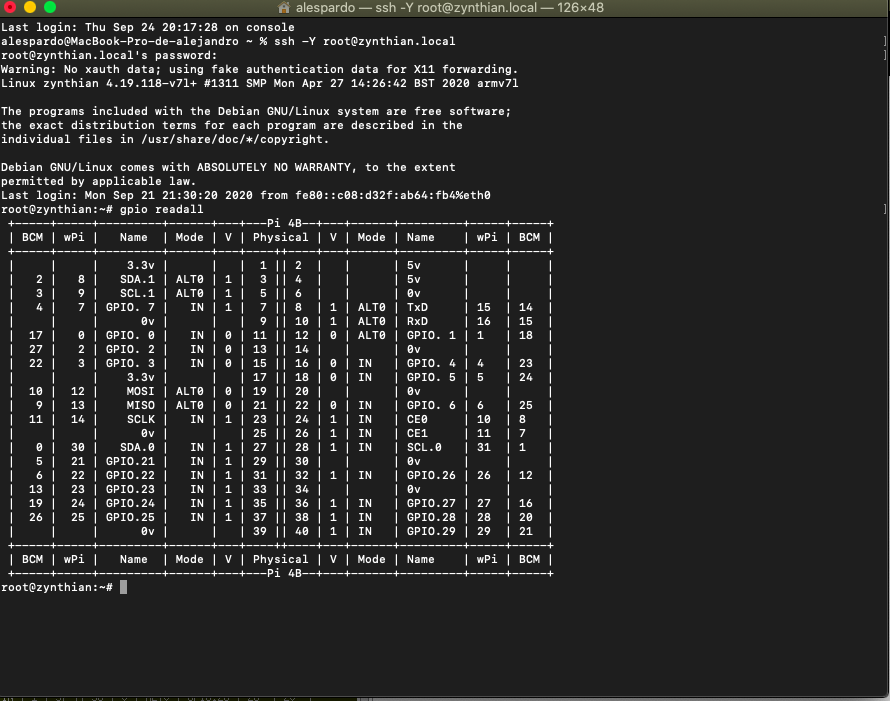
I don’t get why the WPI and the BCM.
To be clear, I wire the pins physical on the GPIO numbers and then on the web config put the WPI numbers of all the wires. But all works like the switch Zynthian option of the encoder. If I push it works but if I turn the encoder makes the same thing like pushing it :S
 what’s the best solution? Buy one?
what’s the best solution? Buy one? 
 e.g.
e.g.